Perguntas Frequentes
| Modelo | Corrente nominal | Mecânica |
| CFW090006 | 6A | 1 |
| CFW090007 | 7A | |
| CFW090010 | 10A | |
| CFW090013 | 13A | |
| CFW090016 | 16A | 2 |
| CFW090024 | 24A | |
| CFW090028 | 28A | |
| CFW090045 | 45A | 3 |
| CFW090054 | 54A | 4 |
| CFW090070 | 70A | 5 |
| CFW090086 | 86A | |
| CFW090105 | 105A | 6 |
| CFW090130 | 130A |
| Modelo | Corrente nominal | Mecânica |
| CFW090003 | 3,6A | 1 |
| CFW090004 | 4A | |
| CFW090005 | 5,5A | |
| CFW090009 | 9A | |
| CFW090013 | 13A | 2 |
| CFW090016 | 16A | |
| CFW090024 | 24A | |
| CFW090030 | 30A | 3 |
| CFW090038 | 38A | 4 |
| CFW090045 | 45A | |
| CFW090060 | 60A | 5 |
| CFW090070 | 70A | |
| CFW090086 | 86A | 6 |
| CFW090105 | 105A | |
| CFW090142 | 142A | 7 |
| CFW090180 | 180A | 8 |
| CFW090211 | 211A | |
| CFW090240 | 240A | |
| CFW090312 | 312A | 9 |
| CFW090361 | 361A | |
| CFW090450 | 450A | 10 |
| CFW090515 | 515A | |
| CFW090600 | 600A |
| Modelo | Corrente nominal | Mecânica |
| CFW090002 | 2,9A | 2 |
| CFW090004 | 4,2A | |
| CFW090007 | 7A | |
| CFW090010 | 10A | |
| CFW090012 | 12A | |
| CFW090014 | 14A | |
| CFW090022 | 22A | 4 |
| CFW090027 | 27A | |
| CFW090032 | 32A | |
| CFW090044 | 44A | 7 |
| CFW090053 | 53A | |
| CFW090063 | 63A | |
| CFW090079 | 79A |
| Modelo | Corrente nominal | Mecânica |
| CFW090107 | 107A | 8E |
| CFW090147 | 147A | |
| CFW090211 | 211A | |
| CFW090247 | 247A | 10E |
| CFW090315 | 315A | |
| CFW090343 | 343A | |
| CFW090418 | 418A | |
| CFW090472 | 472A |
| Modelo | Corrente nominal | Mecânica |
| CFW090100 | 100A | 8E |
| CFW090127 | 127A | |
| CFW090179 | 179A | |
| CFW090225 | 225A | 10E |
| CFW090259 | 259A | |
| CFW090305 | 305A | |
| CFW090340 | 340A | |
| CFW090428 | 428A |
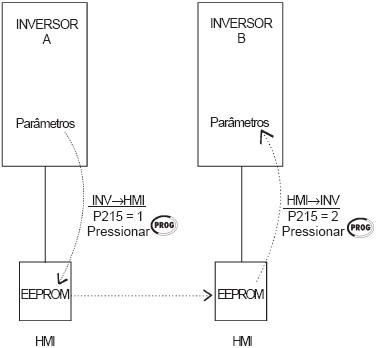
Segue o procedimento para efetuar a função copy:
Conectar a HMI no inversor que se quer copiar os parâmetros (inversor A);
Colocar P215=1 (INV → HMI) para transferir os parâmetros do inversor A para HMI;
Pressionar a tecla PROG. P204 volta automaticamente para 0 (inativa) quando a transferência estiver concluída;
Desligar a HMI do inversor;
Conectar esta mesma HMI no inversor para o qual se deseja transferir os parâmetros (inversor B);
Colocar P215=2 (HMI → INV) para transferir o conteúdo da memória não volátil da HMI (EEPROM contendo os parâmetros do inversor A) para o inversor B;
Pressionar a tecla PROG. Quando P204 voltar para 0 a transferência dos parâmetros foi concluída. A partir deste momento os inversores A e B estarão com o mesmo conteúdo dos parâmetros.
Enquanto a HMI estiver realizando o procedimento de leitura ou escrita, não é possível operá-la.
Observação:
Se os inversores A e B acionarem motores diferentes verificar os parâmetros do motor (P400 ao P408) no inversor B.
Está função somente está disponível no modo de controle escalar (P202=0, 1 ou 2);
A função flying start pode ser utilizada para partir um motor que já está girando. Na partida, o inversor vai impor uma freqüência fixa definida pela velocidade de referencia e aplicar a rampa de tensão definida em P331;
Com o parâmetro P320=1 ou 2, a função flying start será acionada após o tempo ajustado em P332 (para permitir a desmagnetização do motor) sempre que um comando Gira for dado;
Se a função flying start não for necessária em alguns momentos, uma entrada digital pode ser programada para desativar a mesma (programar apenas um dos parâmetros entre P265 a P270 em 17);
O parâmetro P331 ajusta o tempo necessário para que a tensão de saída parta de 0V e atinja o valor de tensão nominal.
Frequência é o número de vezes que um determinado evento se repete dentro de um intervalo de tempo.
A frequência da rede de alimentação utilizada no Brasil é de 60Hz. Isso significa que a tensão da rede repete o seu ciclo sessenta vezes a cada um segundo.
Países como Paraguai, Argentina e todo o continente da Europa utilizam a frequência da rede de alimentação de 50Hz. Já os EUA utilizam também 60Hz.
A freqüência é um dado importante pois influiu na rotação do motor elétrico.
Para maiores informações consulte o catálogo Motores Elétricos - Baixa Tensão (Mercado Brasil), disponível na Central de Downloads WEG : http://www.weg.net/br/Produtos-e-Servicos/Geral/Central-de-Downloads
Rotação é a quantidade de giros no eixo do motor por unidade de tempo, é normalmente expressa em RPM (rotações por minuto). A freqüência da rede na qual o motor está ligado influi diretamente na rotação do motor, conforme tabela abaixo:
Freqüência de 60Hz | Freqüência de 50Hz | ||
Nº de pólos | Rotação Síncrona | Nº de pólos | Rotação Síncrona |
2 pólos | 3.600 RPM | 2 pólos | 3.000 RPM |
4 pólos | 1.800 RPM | 4 pólos | 1.500 RPM |
6 pólos | 1.200 RPM | 6 pólos | 1.000 RPM |
8 pólos | 900 RPM | 8 pólos | 750 RPM |
Note que em 50Hz, a rotação síncrona do motor é menor que em 60Hz.
Para maiores informações consulte o item 1.5.2, página D-10 do catálogo geral de motores elétricos.