Perguntas Frequentes
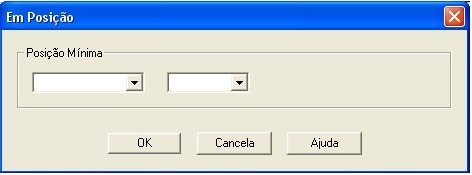
- Posição mínima: define qual a posição que irá acionar a saída ENO, pode ser ajustada de três maneiras:
o Constante Þ pode ser ajustado pela faixa de 3599999,99...3599999,99 º (graus);
o Parâmetros Þ pode ser definido pela seleção de parâmetros 1 (P131, P132 e P133), 2 (P134, P135 e P136), 3 (P137, P138 e P139) e 4 (P140, P141 e P142);
o Ponto memorizado: pode ser um ponto de 1 até 5.
Esta função é utilizada quando se necessita saber se na posição absoluta está na referência de zero máquina.
Símbolo:
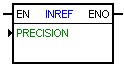
- Se EN está em 1, e a posição absoluta atual é o zero máquina ± precisão, então ENO é setado para 1.
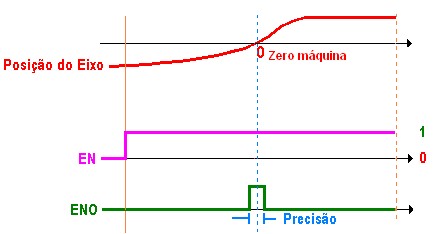
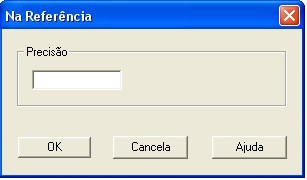
- Precisão: define qual o valor em º (graus) da precisão do zero máquina na posição absoluta, a faixa de ajuste varia de 0,01 até 10,00.
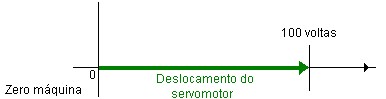
- Posição absoluta: é sempre referenciada a posição de zero máquina;
o Por exemplo: depois de definido qual é o zero máquina, é dado o comando para o servomotor girar 100 voltas:
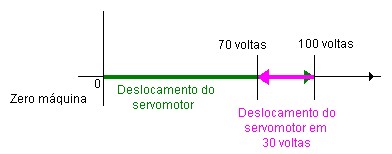
o Depois do servomotor ter percorrido as 100 voltas, for dado o comando para percorrer 70 voltas, ele irá reverter o sentido de giro, e voltar as 30 voltas, pois ele está se referindo ao zero:
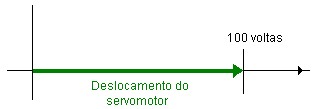
· Posição relativa: parte sempre do ponto aonde se encontra o eixo do servomotor;
o Por exemplo: é dado o comando para o servomotor girar 100 voltas:
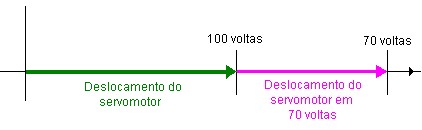
o Depois do servomotor ter percorrido as 100 voltas, for dado o comando para percorrer 70 voltas, ele irá partir do ponto aonde parou com as 100 voltas:
Esta função é utilizada para o deslocamento do servomotor com uma melhor curva de aceleração e desaceleração, proporcionando um posicionamento mais suave.
Símbolo:
· Uma vez EN em 1, ele começa a mover para a posição na forma S, quando o eixo chegar na posição, ENO vai para 1 neste ciclo de varredura. Somente o bloco de função Parada pode parar o movimento.
