Perguntas Frequentes
Para que o Controle de Torque atue é necessário manter o regulador de velocidade saturado (P0160=1). O valor de torque imposto ao motor é definido pelos limites de torque em P0169/P0170 ou pela entrada analógica AIx programada na opção 2 (Máxima Corrente de Torque).
A performance do controle de torque é a seguinte:
· Controle Vetorial com Encoder: - Faixa de controle de torque: 10% a 180%;
- Precisão: ± 5% do torque nominal.
· Controle Vetorial Sensorless: - Faixa de controle de torque: 20% a 180%;
- Precisão: ± 10% do torque nominal;
- Freqüência mínima de operação: 3 Hz.
Quando o regulador de velocidade estiver saturado positivamente, ou seja, em sentido de giro horário, o valor para a limitação de corrente de torque é ajustado em P0169. Quando o regulador de velocidade estiver saturado negativamente, ou seja, em sentido de giro anti-horário, o valor para a limitação de corrente de torque é ajustado em P0170.
NOTA!
· Para o controle de torque no Modo Vetorial Sensorless (P0202=3) os limites de torque devem ser maiores que 30% para garantir a partida do motor. Após a partida, e com o motor girando acima de 3 Hz, eles podem ser reduzidos para valores abaixo de 30%, se necessário;
· No tipo de controle Vetorial com Encoder, o regulador de velocidade deve ser programado para o modo “otimizado para controle de torque” (P0160=1), além de ser mantido saturado;
· A corrente nominal do motor deve ser equivalente à corrente nominal do CFW-11 para que o controle de torque tenha a melhor precisão possível;
· A referência de velocidade deve ser ajustada com valor maior ou igual a 10% da velocidade de trabalho do motor. Isso garante que a saída do regulador de velocidade fique saturada no valor máximo permitido pelo ajuste de limite de torque.
Mais informações ver em “Qual a função dos parâmetros P0169 e P0170?”
A função Fluxo Ótimo pode ser ativada somente quando o inversor opera em modo de controle Vetorial Sensorless (P0202=3), colocando P0406=2. Neste caso, a freqüência de chaveamento (P0297) é limitada em 5kHz.
Esta função pode ser utilizada no acionamento de alguns tipos de motores WEG (Nema Premium Efficiency, Nema High Efficiency, IEC Premium Efficiency, IEC Top Premium Efficiency e Alto Rendimento Plus), permitindo a operação em baixas velocidades com torque nominal sem a necessidade de ventilação forçada no motor.
A faixa de freqüência de operação é de 12:1, ou seja, de 5Hz a 60Hz para motores com freqüência nominal de 60Hz e de 4,2Hz a 50Hz para motores com freqüência nominal de 50Hz.
Com a função Fluxo Ótimo ativa, o fluxo no motor é controlado de forma a reduzir as perdas elétricas no motor em baixas velocidades, quando se estiver operando com torque nominal. Caso o torque de carga atinja o valor nominal, em baixas rotações, somente durante alguns segundos, ou esteja abaixo da curva de derating de torque do motor autoventilado (em baixas rotações), não há vantagens na utilização da função Fluxo Ótimo. Também não faz sentido utilizar esta função em motores com ventilação independente.
É a aplicação de corrente contínua no motor, permitindo a parada rápida do mesmo.
A tabela abaixo apresenta os parâmetros relacionados à Frenagem CC, de acordo com o modo de controle selecionado. Quando P0202=4 (controle Vetorial com Encoder), a Frenagem CC não atua.

A função Flying Start permite acionar um motor que está em giro livre, acelerando-o a partir da rotação em que ele se encontra.
Quando estiver
No modo vetorial Sensorless inicia-se o processo de Flying Start logo após a aplicação do comando “Gira”, fazendo uma varredura (busca) usando o controle escalar I/f, onde I é constante e f varia desde o valor de P0134 até zero. A taxa de variação de freqüência é determinada por (P0329xP0412). Ao encontrar a velocidade do motor, o modo de controle é alterado de I/f para vetorial Sensorless e o motor é acionado até a referência de velocidade indicada em P0001.
Em modo vetorial com Encoder, durante o intervalo de tempo em que o motor estiver sendo magnetizado, ocorre a identificação da velocidade do motor. Concluída a magnetização, o motor será acionado a partir desta velocidade até a referência de velocidade indicada em P0001.
NOTA!
· Quando o comando de habilita geral for ativado, não ocorrerá a magnetização do motor;
· Para o melhor funcionamento da função (com P0202=3), recomenda-se a ativação da frenagem sem perdas, ajustando o parâmetro P0185;
· Desejando-se desativar momentaneamente a função Flying Start, pode-se programar uma das entradas digitais, P0263 a P0270, em 24 (Desab. FlyStart);
· Quando a função Flying Start for ativada, o parâmetro P0357 (Detecção de Falta de Fase da Rede) é desconsiderado, independentemente do tempo ajustado.
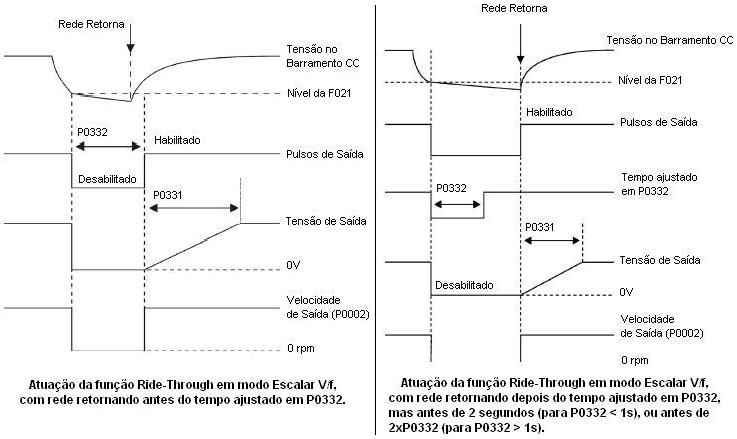
A função Ride-Through possibilita a recuperação do inversor, sem bloqueio por subtensão, quando ocorrer uma queda de tensão na rede de alimentação.
Quando o inversor estiver
Caso a tensão da rede demore muito a retornar (mais de 2 segundos), o inversor pode indicar F021 (subtensão no barramento CC). Se a tensão retornar antes, o inversor voltará a habilitar os pulsos, impondo a referência de velocidade instantaneamente e fazendo uma rampa de tensão com tempo definido pelo parâmetro P0331, conforme figuras apresentadas abaixo:
A atuação da função Ride-Through pode ser visualizada nas saídas DO1 (RL1), DO2 (RL2), DO3 (RL3), DO4 e/ou DO5 (P0275 a P0279), desde que as mesmas sejam programadas em 24 (Ride-Through).