Contacto
Preguntas Frecuentes (FAQ)
Esta função deve ser utilizada quando P0184=2.
Se a entrada digital estiver fechada (+24 V) a frenagem atua no modo Sem Perdas (P0184=1).
Se estiver aberta (0 V) a frenagem Sem Perdas fica inativa e a tensão do Barramento CC será controlada pelo parâmetro P0153 (Frenagem Reostática).
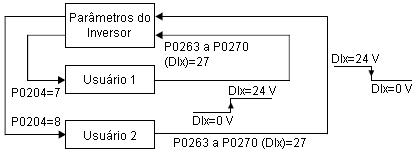
Quando a entrada digital programada para “Carrega Usuário 1/2” passar de nível baixo (0 V) para nível alto (+24 V) é carregada a memória do usuário 1, desde que anteriormente tenha sido transferido o conteúdo dos parâmetros atuais do inversor para a memória de parâmetros 1 (P0204=10).
Este processo é semelhante ao de programar P0204=9.
Quando o estado da entrada digital alterar de nível alto (+24 V) para nível baixo (0 V) é carregada a memória do usuário 2, desde que anteriormente tenha sido transferido o conteúdo dos parâmetros atuais do inversor para a memória de parâmetros 2 (P0204=11).
Este processo é semelhante ao de programar P0204=7 ou 8.
Notas!
· Assegurar-se que ao utilizar esta função, o conjunto de parâmetros (Memória do Usuário 3) seja totalmente compatível com a aplicação (motores, comandos liga/desliga, etc);
· Com o motor habilitado não será possível carregar memória do usuário;
· Se forem salvos dois ou três conjuntos de parâmetros diferentes de motores nas memórias de usuário 1, 2 e/ou 3, deve-se ajustar os valores de corrente corretos nos parâmetros P0156, P0157 e P0158 para cada usuário.
Mais informações ver em “Como funcionam as entradas digitais quando programadas para “Carrega Usuário 3”?”.
Quando a entrada digital programada para “Velocidade/Torque” estiver aberta (0 V) estará selecionado o controle de Velocidade e quando estiver fechada (+24 V) estará selecionado o controle de Torque.
Essa função é válida somente para os modos de controle Vetorial Sensorless ou Vetorial com Encoder (P0202=3 ou 4).
Quando for selecionado Torque, os parâmetros do regulador de velocidade P0161 e P0162 ficam inativos. Com isto, a referência total passa a ser a entrada do Regulador de Torque (o regulador de velocidade do tipo PID é convertido em um regulador tipo P, com ganho proporcional 1.00 e ganho integral mulo).
Quando for selecionada Velocidade, os ganhos do regulador de velocidade voltam a ser definidos por P0161 e P0162.
Quando a entrada digital programada para “Manual/Automático” estiver aberta (0 V), o CFW11 terá a referência de velocidade conforme definido em P0221/P0222.
Quando a entrada for fechada (+24 V), a referência passará a ser definida pela saída do regulador PID.
As saídas digitais ou as saídas à relé programadas para “Conteúdo do P0695” terão seu estado controlado pelo parâmetro P0695, o qual é escrito via rede de comunicação.
