Contacto
Preguntas Frecuentes (FAQ)
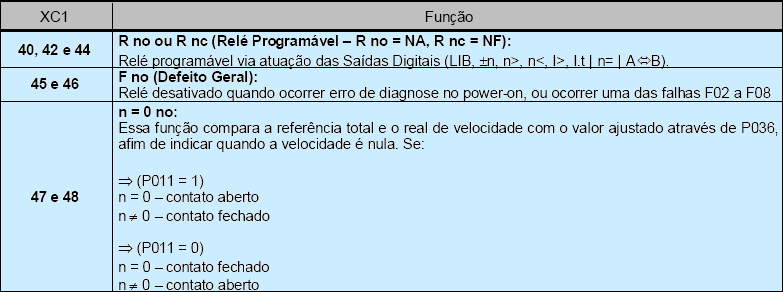
As funções das saídas digitais são apresentadas na tabela a seguir. As saídas se encontram no conector XC1.
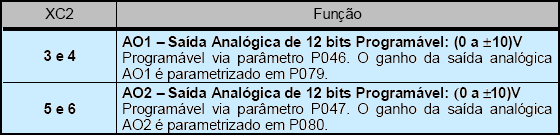
Possui também as saídas analógicas de 12bits:
XC3 é o conector de Comunicação Serial RS-232.
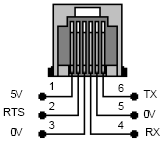
Pode-se comandar, parametrizar e supervisionar o CTW – 04 através da interface serial RS-232. O protocolo de comunicação é baseado no tipo pergunta/resposta conforme normas ISO 1745, ISO 646, com troca de caracteres do tipo ASCll entre os conversores e um mestre (controlador da rede – pode ser um CLP, PC, etc.). A taxa de transmissão máxima é 9600 bps. A interface serial RS-232 é ponto a ponto, não isolada galvanicamente do 0V (o qual está aterrado na eletrônica do conversor) e permite distâncias de até 10m.
O conector XC3 está disponível no cartão de controle CCW4.
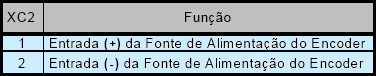
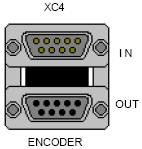
Nas aplicações que necessitam de maior precisão de velocidade é necessário a realimentação de velocidade do eixo do motor através de Encoder Incremental e este é ligado no conector XC4.
O conector de sinais de controle XC4 está disponível apenas nos modelos do conversor CTW04 onde é especificado o cartão CCW4.00 – Full (F – versão completa), conforme código do produto.
- Acoplar o encoder diretamente ao eixo do motor (usando um acoplamento flexível, porém sem flexibilidade torsional);
- Tanto o eixo quanto a carcaça metálica do encoder devem estar eletricamente isolados do motor (espaçamento mínimo de 3 mm);
- Utilizar acoplamentos flexíveis de boa qualidade que evitem oscilações mecânicas ou ‘backlash’;
- Para a conexão elétrica utilizar cabo blindado, mantendo-o tão longe quanto possível (>25cm) das demais fiações (potência, controle, etc.). De preferência dentro de um eletroduto metálico.
