Preguntas Frecuentes (FAQ)
Limitação de corrente tipo “Hold de Rampa”:
· Evita o tombamento do motor durante sobrecarga de torque na aceleração ou desaceleração;
· Atuação: se a corrente do motor ultrapassar o valor ajustado em P0135 durante a aceleração ou desaceleração, a velocidade não será mais aumentada (aceleração) ou diminuída (desaceleração). Quando a corrente do motor atingir um valor abaixo de P0135 o motor volta a acelerar ou desacelerar;

· Possui ação mais rápida que o modo “Desacelera Rampa”;
· Atua nos modos de motorização e frenagem.
Limitação de corrente tipo “Desacelera Rampa”:
· Evita o tombamento do motor durante sobrecarga de torque na aceleração ou em velocidade constante;
· Atuação: se a corrente do motor ultrapassar o valor ajustado em P0135, a entrada da rampa de velocidade é zerada forçando a desaceleração. Quando a corrente do motor atingir um valor abaixo de P0135 o motor volta a acelerar.

Limitação rápida de corrente:
· Diminui instantaneamente a tensão de saída do inversor quando a corrente do motor atingir o valor de 1,9xInom-HD.
No modo V/f existem dois tipos de função para limitar a tensão do barramento CC:
“Hold de Rampa”:
· Tem efeito somente na desaceleração;
· Forma de atuação: quando a tensão do barramento CC atinge o nível ajustado em P0151 é enviado um comando ao bloco “rampa”, que inibe a variação da velocidade do motor (“hold de rampa”);
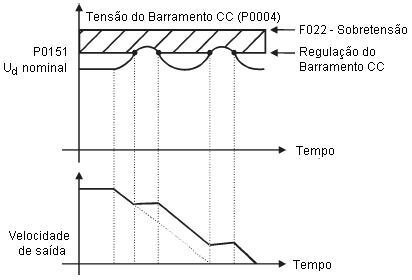
· Consegue-se um tempo de desaceleração otimizado (mínimo possível) para a carga acionada;
· Uso recomendado no acionamento de cargas com alto momento de inércia referenciado ao eixo do motor ou cargas com média inércia, que exigem rampas de desaceleração curtas.
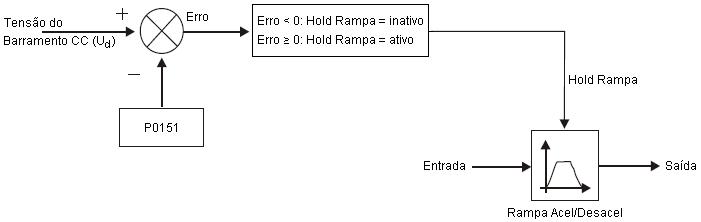
Acelera Rampa:
· Tem efeito em qualquer situação, independente da condição da velocidade do motor (durante a aceleração, desaceleração ou com velocidade constante);
· Forma de atuação: a medida de tensão do barramento CC é comparada com o valor ajustado em P0151 e a diferença entre estes sinais (erro) é multiplicado pelo ganho proporcional (P0152). Este valor é então somado à saída da rampa;
· Consegue-se um tempo de desaceleração otimizado (mínimo possível) para a carga acionada;
· Sua utilização é recomendada para cargas que exigem torques de frenagem na situação de velocidade constante. Exemplo: acionamento de cargas com eixo excêntrico como os existentes em bombas tipo cavalo de pau.

É um modo de controle simples, baseado em uma curva que relaciona a freqüência e a tensão de saída. O inversor funciona como uma fonte de tensão gerando valores de freqüência e tensão de acordo com esta curva. É possível o ajuste desta curva para motores padrão 50 Hz ou 60 Hz ou especiais, através da curva V/f ajustável.
A vantagem do controle V/f é, devido a sua simplicidade, a necessidade de poucos ajustes. A colocação em funcionamento é rápida e simples e o ajuste padrão de fábrica, em geral, necessita de pouca ou nenhuma alteração.
Este modo de controle é recomendado para os seguintes casos:
· Acionamento de vários motores com o mesmo inversor;
· Corrente nominal do motor menor que 1/3 da corrente nominal do inversor;
· Testes sem motor conectado na saída do inversor ou com um motor pequeno sem carga.
O controle escalar também pode ser usado em aplicações que não exijam resposta dinâmica rápida, precisão na regulação de velocidade ou alto torque de partida.
A Frenagem Ótima é uma função que auxilia na frenagem controlada do motor, eliminando muitas vezes a necessidade de IGBT e resistor de frenagem adicionais.
Esta função pode ser ativada somente nos modos de controle vetorial sensorles ou vetorial com encoder (P0202=3 ou 4) e possibilita a frenagem do motor com torque maior do que aquele obtido em alguns outros métodos como, por exemplo, a frenagem CC.
Utiliza as perdas totais no motor e no inversor para dissipar a energia armazenada na inércia da carga mecânica acionada.
Na figura a seguir é apresentada uma curva de Torque x Velocidade de um motor típico de 10 CV/7.5 kW e IV pólos. O torque de frenagem obtido na velocidade nominal, para inversor com limite de torque (P0169 e P0170) ajustado em um valor igual ao torque nominal do motor, é fornecido pelo ponto TB1.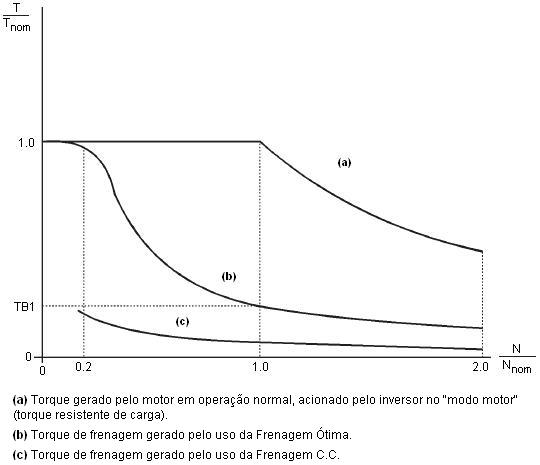
O valor de TB1 irá depender do rendimento do motor e, quando desprezadas as perdas por atrito, é dado por:

Onde:
η = rendimento do motor.
O torque de frenagem, partindo do ponto TB1, varia na proporção inversa da velocidade (1/N). Em velocidades baixas o torque de frenagem atinge o valor da limitação de torque do inversor. É possível aumentar o torque de frenagem aumentando o valor da limitação de corrente do inversor durante a frenagem ótima (P0169 – torque no sentido horário e P0170 – torque no sentido anti-horário).
ATENÇÃO!
A atuação da frenagem ótima pode causar no motor:
· Aumento do nível de vibração;
· Aumento do ruído acústico;
· Aumento da temperatura.
Verificar o impacto destes itens na aplicação antes de utilizar a frenagem ótima.
Informações sobre como ativar a Frenagem Ótima ver em “Qual a função do parâmetro P0184?”
O modo I/f é um controle escalar com corrente imposta. É ativado automaticamente em baixas velocidades se P0182 > 3 e se o Modo de Controle for Vetorial Sensorless (P0202=3).
Tem por objetivo manter a operação estável do inversor em baixas velocidades, passando a controlar a corrente de acordo com o valor ajustado em P0183. A velocidade deixará de ser controlada.
O parâmetro P0182 define a velocidade abaixo da qual ocorrerá a transição para o modo I/f.
A velocidade mínima recomendada para operação do controle Vetorial Sensorless é de 18 rpm para motores de IV pólos com freqüência nominal de 60 Hz e de 15 rpm para motores com IV pólos com freqüência nominal de 50 Hz.
Se P0182 ≤ 3 rpm o inversor irá sempre atuar no modo Vetorial Sensorless, ficando a função I/f desativada.