Contact
Frequently Asked Questions (FAQ)
A função Ride-Through possibilita a recuperação do inversor, sem bloqueio por subtensão, quando ocorrer uma queda de tensão na rede de alimentação.
Quando o inversor estiver
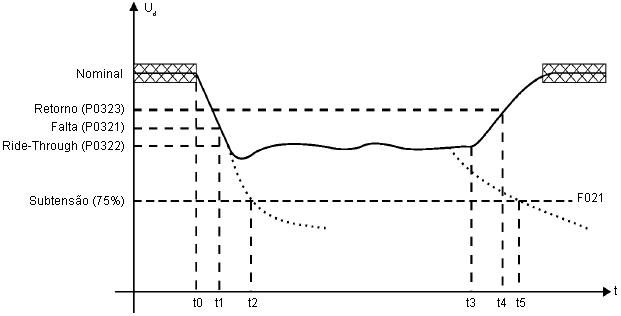
Conforme a figura acima, após a falta de rede (t0), a tensão do barramento CC (Ud) começa a diminuir segundo uma taxa dependente da condição de carga do motor, podendo atingir o nível de subtensão (t2) se a função Ride-Through não estiver operando. O tempo típico necessário para que isto ocorra, com carga nominal, é da ordem de 5 a 15ms.
Com a função Ride-Through ativa, a falta de rede é detectada quando a tensão Ud atingir um valor abaixo do valor “Ud para Falta de Rede” (t1), definido no parâmetro P0321. Imediatamente o inversor inicia a desaceleração controlada do motor, regenerando energia para o barramento CC de modo a manter o motor operando com a tensão Ud regulada no valor “Ud para Ride-Through” (P0322).
Caso a rede não retorne, o conjunto permanece nesta condição o maior tempo possível (depende do balanço energético) até a ocorrência da subtensão (F021 em t5). Se a rede retornar antes da ocorrência da subtensão (t3), o inversor detectará o seu retorno, quando a tensão Ud atingir o nível “Ud para Retorno da Rede” (t4), definido no parâmetro P0323. O motor é então reacelerado, seguindo a rampa ajustada, desde o valor atual da velocidade até o valor definido pela referência de velocidade P0001.
Se a tensão da rede produzir uma tensão Ud entre os valores ajustados em P0322 e P0323, pode ocorrer F150 (Sobrevelocidade no Motor). Se isto ocorrer, os valores de P0321, P0322 e P0323 devem ser reajustados.
A ativação da função Ride-Through ocorre quando a tensão da rede de alimentação for menor que o valor (P0321 ÷ 1,35). Logo,  .
.
Nota!
Quando a função Ride-Through for ativada, o parâmetro P0357 (Detecção de Falta de Fase da Rede) é desconsiderado, independentemente do tempo ajustado.
Cuidados com a aplicação:
· É obrigatório o uso de reatância de rede para limitar a corrente inrush no retorno da rede de alimentação;
· Utilizar fusíveis ultra-rápidos sobre dimensionados ou fusíveis normais, também devido a corrente inrush.
A função busca de zero do encoder tem por objetivo sincronizar a contagem mínima ou a máxima visualizada no P0039 (Contador dos Pulsos do Encoder) com o pulso de zero do encoder (sinal do canal Z).
A função é ativada colocando P0191=1. Será executada apenas uma vez ao receber o primeiro pulso de zero após a habilitação da função.
O parâmetro P0039 é zerado (ou ajustado com o valor de 4*P0405) e o P0192 passa a indicar Concluído.
A saída digital terá o transistor saturado, ou a saída à relé terá sua bobina energizada, quando a velocidade do motor estiver abaixo do valor programado em P0291 (Velocidade Nula).

A saída digital terá o transistor saturado, ou a saída à relé terá sua bobina energizada, quando a Frequência do Motor (F) for maior que o valor programado para Fx (P0281) somado a histerese (valor programado em P0282).
A saída digital, ou a saída à relé, será desativada (OFF) quando a frequência for menor que Fx (P0281) menos a histerese (P0282).

A saída digital terá o transistor saturado, ou a saída à relé terá sua bobina energizada, quando a Velocidade do Motor (V) for maior que Nx (P0288) e a Referência Total de Velocidade (Nt) for maior que Nx (P0288).
A saída digital, ou a saída à relé, será desativada (OFF) quando uma das condições deixar de ser atendida.
Esta função é válida somente para o modo de controle Vetorial com Encoder.

