Frequently Asked Questions (FAQ)
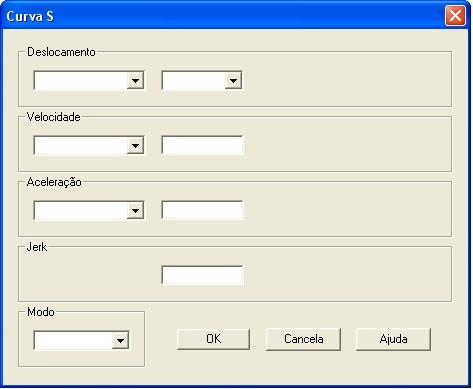
· Deslocamento: define o deslocamento que o servomotor irá percorrer, pode ser ajustado de três maneiras:
o Constante Þ pode ser ajustado pela faixa de 3599999,99...3599999,99 º (graus);
o Parâmetros Þ pode ser definido pela seleção de parâmetros 1 (P131, P132 e P133), 2 (P134, P135 e P136), 3 (P137, P138 e P139) e 4 (P140, P141 e P142);
o Ponto memorizado: pode ser um ponto de 1 até 5;
· Velocidade: define qual será a velocidade que o servomotor irá trabalhar durante o deslocamento, pode ser ajustado de duas maneiras:
- Constante Þ é um valor fixo da velocidade que pode ser ajustado pela faixa de 1,21...36000,00 º/s (graus/segundo);
- Parâmetros Þ o valor da velocidade pode ser definido pelos parâmetros P145 ou P146;
· Aceleração: define qual o valor da aceleração, pode ser ajustado de duas maneiras:
o Constante Þ é um valor fixo de aceleração que poder ser ajustado pela faixa de 28,60...2864788,98 º/s2 (graus/segundo2);
o Parâmetros Þ o valor da aceleração pode ser definido pelos parâmetros P147 ou P148;
· Jerk: define a curva S, dando mais suavidade para a partida e para a parada, pode ser ajustada pela faixa de 5,72...14323944,90 º/s3 (graus/segundo3), quanto maior o valor de Jerk, mais parecida será com a Curva Trapezoidal;
· Modo: define qual será o modo de trabalho, se será Relativo ou Absoluto, para maiores informações ver em Qual a diferença entre posição absolta e posição relativa?.
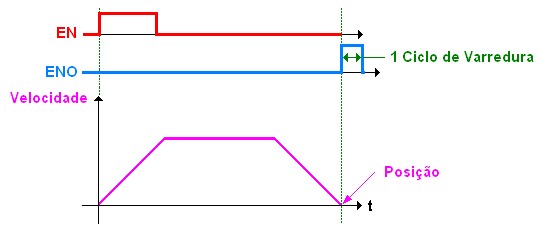
Esta função é utilizada para deslocamento do servomotor, com controle posição, velocidade, aceleração e modo de trabalho.
Símbolo:

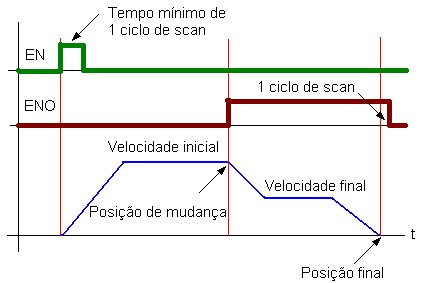
- Uma vez que a entrada EN está ativa, ele começa a mover para a posição referida de forma trapezoidal (T), quando o eixo encontrar a posição, a saída ENO é ativada neste ciclo de varredura. Somente o bloco de função Parada pode parar o movimento.
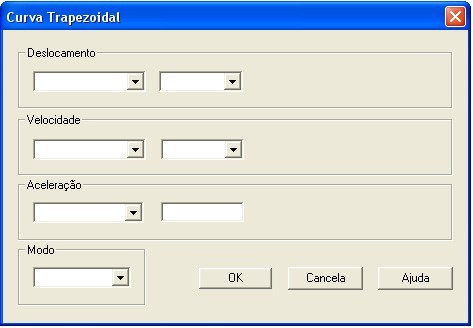
· Deslocamento: define o deslocamento que o servomotor irá percorrer, pode ser ajustado de três maneiras:
o Constante Þ pode ser ajustado pela faixa de 3599999,99...3599999,99 º (graus);
o Parâmetros Þ pode ser definido pela seleção de parâmetros 1 (P131, P132 e P133), 2 (P134, P135 e P136), 3 (P137, P138 e P139) e 4 (P140, P141 e P142);
o Ponto memorizado: pode ser um ponto de 1 até 5;
· Velocidade: define qual será a velocidade que o servomotor irá trabalhar durante o deslocamento, pode ser ajustado de duas maneiras:
- Constante Þ é um valor fixo da velocidade que pode ser ajustado pela faixa de 1,21...36000,00 º/s (graus/segundo);
- Parâmetros Þ o valor da velocidade pode ser definido pelos parâmetros P145 ou P146;
· Aceleração: define qual o valor da aceleração, pode ser ajustado de duas maneiras:
o Constante Þ é um valor fixo de aceleração que poder ser ajustado pela faixa de 28,60...2864788,98 º/s2 (graus/segundo2);
o Parâmetros Þ o valor da aceleração pode ser definido pelos parâmetros P147 ou P148;
· Modo: define qual será o modo de trabalho, se será Relativo ou Absoluto, para maiores informações ver em Qual a diferença entre posição absolta e posição relativa?.
Esta função é utilizada para deslocamento do servomotor com controle de duas velocidades e posições, através da curva trapezoidal.
Símbolo:
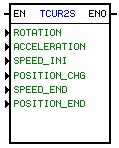
· Quando a entrada EN está ativa, ele começa a mover para a posição programado em Deslocamento com a velocidade definida por Velocidade Inicial, obedecendo a rampa de aceleração;
· Decorrido o deslocamento programado, ele vai para a velocidade programada em Velocidade Final, concluindo com o deslocamento programado em Posição no Deslocamento para Mudança de Velocidade, sempre obedecendo a rampa de aceleração;
· A função Stop somente atua no modo cancela.
Observação:
· O valor da Posição no Deslocamento para Mudança de Velocidade não pode ser maior que o valor do Deslocamento, pois ele se desloca com o valor do primeiro deslocamento, e depois no deslocamento final, há somente a diferença de deslocamento entre os dois valores.
· Exemplo: Se for programado para a Posição no Deslocamento para Mudança de Velocidade em um valor de 5 voltas, o valor do Deslocamento em 12, depois de percorrido as 5 voltas (1º deslocamento), o servomotor irá girar somente mais 7voltas (deslocamento final), totalizando as 12 voltas programadas no Deslocamento.
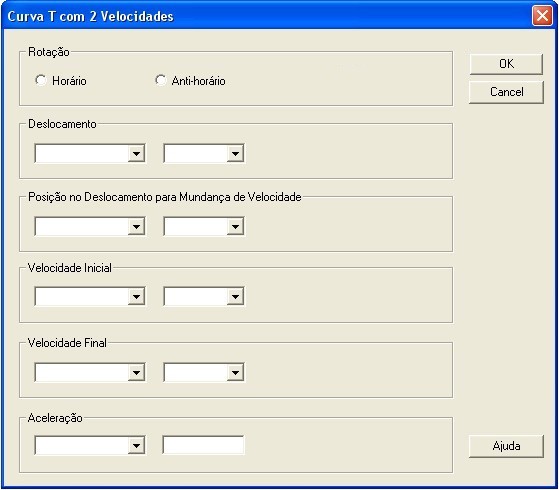
- Rotação: define qual será o sentido de giro;
- Deslocamento: define qual o valor máximo de deslocamento, pode ser ajustado de três maneiras:
o Constante Þ pode ser ajustado pela faixa de 0,00...3599999,99 º (graus);
o Parâmetros Þ pode ser definido pela seleção de parâmetros 1 (P132 e P133), 2 (P135 e P136), 3 (P138 e P139) e 4 (P141 e P142);
- Posição no Deslocamento para Mudança de Velocidade: define qual o ponto que será feita a mudança das velocidades:
o Constante Þ pode ser ajustado pela faixa de 0,00...3599999,99 º (graus);
o Parâmetros Þ pode ser definido pela seleção de parâmetros 1 (P132 e P133), 2 (P135 e P136), 3 (P138 e P139) e 4 (P141 e P142);
- Velocidade inicial: define qual será o valor da 1ª velocidade, pode ser ajustado de duas maneiras:
o Constante Þ é um valor fixo da velocidade que pode ser ajustado pela faixa de 1,21...36000,00 º/s (graus/segundo);
o Parâmetros Þ o valor da velocidade pode ser definido pelos parâmetros P145 ou P146;
- Velocidade final: define qual o valor da velocidade final, pode ser ajustado de duas maneiras:
o Constante Þ é um valor fixo da velocidade que pode ser ajustado pela faixa de 1,21...36000,00 º/s (graus/segundo);
o Parâmetros Þ o valor da velocidade pode ser definido pelos parâmetros P145 ou P146;
- Aceleração: define o valor de aceleração utilizado, pode ser ajustado de duas maneiras:
o Constante Þ é um valor fixo de aceleração que poder ser ajustado pela faixa de 28,60...2864788,98 º/s2 (graus/segundo2);
o Parâmetros Þ o valor da aceleração pode ser definido pelos parâmetros P147 ou P148.