Frequently Asked Questions (FAQ)
A HMI standard do CFW-09 (HMI-CFW09-LCD), contém um display de leds de 4 dígitos de 7 segmentos, um display de cristal líquido com 2 linhas de 16 caracteres alfanuméricos, 4 leds e 8 teclas:
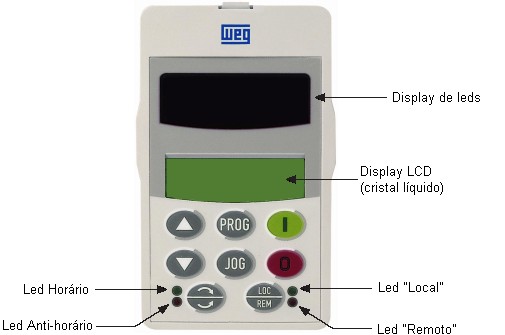
Funções do display de leds: mostra as mensagens de erro e estado, o número do parâmetro ou seu conteúdo. O display unidade (mais à direita) indica a unidade da variável indicada:
o A Þ corrente;
o U Þ tensão;
o H Þ freqüência;
o Nada Þ velocidade e demais parâmetros;
Observação:
Quando a indicação for maior que 9999 (em RPM, por exemplo) o algarismo correspondente a dezena de milhar não será visualizado (exemplo: 12345 RPM será lido como 2345 RPM), a indicação correta somente será visualizada no display LCD.
· Funções do display de LCD (cristal líquido): mostra o número do parâmetro e seu conteúdo simultaneamente, sem a necessidade de pressionar a tecla PROG. Além disso, há uma breve descrição da função de cada parâmetro e são indicadas as unidades (A, Hz, V, s, %, entre outros) dos mesmos quando for o caso. Também fornece uma breve descrição do erro ou estado do inversor;
· Funções dos leds Local e Remoto:
o Inversor no modo Local: led verde acesso e led vermelho apagado;
o Inversor no modo Remoto: led verde apagado e led vermelho acesso;
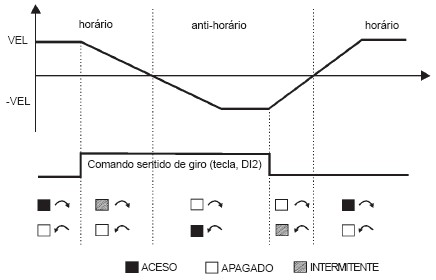
· Funções dos leds de sentido de giro (horário e anti-horário): a indicação do sentido de giro funciona conforme a figura a seguir:
Funções básicas das teclas: as funções a seguir são válidas para programação padrão de fábrica e em operação em modo local, essas funções podem variar conforme a reprogramação dos parâmetros P220 a P228:
 -> Habilita o inversor via rampa (partida). Após a habilitação, a cada toque comuta as indicações de acesso rápido no display como indicado abaixo:
-> Habilita o inversor via rampa (partida). Após a habilitação, a cada toque comuta as indicações de acesso rápido no display como indicado abaixo: 
 -> Desabilita o inversor via rampa (parada). Reseta o inversor após a ocorrência de erros;
-> Desabilita o inversor via rampa (parada). Reseta o inversor após a ocorrência de erros;
 -> Seleciona (comuta) display entre número do parâmetro e seu valor (posição/conteúdo);
-> Seleciona (comuta) display entre número do parâmetro e seu valor (posição/conteúdo);

 -> Aumenta a velocidade, número do parâmetro ou valor do parâmetro. Diminui a velocidade, número do parâmetro ou valor do parâmetro;
-> Aumenta a velocidade, número do parâmetro ou valor do parâmetro. Diminui a velocidade, número do parâmetro ou valor do parâmetro;
 -> Inverte o sentido de rotação do motor comutando entre horário e anti-horário;
-> Inverte o sentido de rotação do motor comutando entre horário e anti-horário;
 -> Seleciona a origem dos comandos/referência entre Local e Remoto.
-> Seleciona a origem dos comandos/referência entre Local e Remoto.
 -> Quando pressionada realiza a função Jog.
-> Quando pressionada realiza a função Jog.
1) Dois ou mais parâmetros entre P264 a P270 iguais a 1 (LOC/REM)
2) Dois ou mais parâmetros entre P265 a P270 iguais a 6 (2ª rampa)
3) Dois ou mais parâmetros entre P265 a P270 iguais a 9 (Velocidade/Torque)
4) P265 igual a 8 e P266 diferente de 8 ou vice versa (AVANÇO/RETORNO)
5) P221 ou P222 igual a 8 (Multispeed) e P266 ≠ 7 e P267 ≠ 7 e P268 ≠ 7
6) (P221=7 e P222=7) e [(P265 ≠ 5 ou P267 ≠ 5) ou (P266 ≠ 5 ou P268 ≠ 5)]
(com referência = E.P. e sem DIx = acelera E.P. ou sem DIx = desacelera E.P.)
7) (P221 ≠ 7 e P222 ≠ 7) e [(P265=5 e P267=5) ou (P266=5 e P268=5)]
(sem referência = E.P. e com Dix=acelera EP ou com Dix = desacelera E.P.)
8) P264 e P266 igual a 8 (Retorno)
9) P265 ou P267 ou P269 igual a 14 e P266 e P268 e P270 diferente de 14
(com DIx=START, Sem DIx= STOP)
10) P266 ou P268 ou P270 igual a 14 e P265 e P267 e P269 diferente de 14
(sem START, com STOP)
11) P220>1 e P224=P227=1 e sem DIx=Gira/Pára ou DIx=Parada Rápida e sem DIx=Habilita geral
12) P220=0 e P224=1 e sem DIx=Gira/Pára ou Parada Rápida e sem DIx =Habilita Geral
13) P220=1 e P227=1 e sem DIx=Gira/Pára ou Parada Rápida e sem DIx=Habilita Geral
14) DIx=START e DIx=STOP, porém P224 ≠ 1 e P227≠ 1
15) Dois ou mais parâmetros entre P265 a P270 iguais a 15(MAN/AUT)
16) Dois ou mais parâmetros entre P265 a P270 iguais a 17(Desabilita Flying Start)
17) Dois ou mais parâmetros entre P265 a P270 iguais a 18(Regulador de Tensão CC)
18) Dois ou mais parâmetros entre P265 a P270 iguais a 18
(Bloqueio de parametrização)
19) Dois ou mais parâmetros entre P265 a P269 iguais a 20(Carrega Usuário Via DIx)
20) P296=8 e P295=4, 6, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, ou 49 (P295 incompatível com modelo do inversor – Para evitar danos nos componentes internos do inversor)
21) P295=5, 6, 7 ou 8 e P297=3 (P297 incompatível com o modelo do inversor)
22) Dois ou mais parâmetros entre P265 a P270 iguais a 21(Temporizador RL2)
23) Dois ou mais parâmetros entre P265 a P270 iguais a 22(Temporizador RL3)
24) P265 ou P266 ou P267 ou P268 ou P269 ou P270=21 e P279 ≠ 28
25) P265 ou P266 ou P267 ou P268 ou P269 ou P270=22 e P280 ≠ 28
26) P279=28 e P265 ou P266 ou P267 ou P268 ou P269 ou P270 ≠ 21
27) P280=28 e P265 ou P266 ou P267 ou P268 ou P269 ou P270 ≠ 22
28) P202=0, 1, 2 e 5 e P237=1 ou P241=1 ou P265 a P270=JOG+ ou P265 a P270=JOG-
29) P203=1 e P211=1 e (P224=0 ou P227=0)
30) P220=0 e P224=1 e P227=0 ou P227=1 e P263=0
31) P220=1 e P224=0 ou P224=1 e P227=1 e P263=0
32) P220=2 e P224=0 ou P224=1 e P227=0 ou P227=1 e P263=0
Perigo!
Sempre desconecte a alimentação geral antes de efetuar quaisquer conexões.
Verificar todas as conexões: verificar se as conexões de potência, aterramento e de controle estão corretas e firmes;
Limpar o interior do inversor: retirar todos os restos de materiais do interior do inversor ou acionamento;
Verificar a correta seleção de tensão no inversor: para maiores informações ver em Como selecionar a tensão nominal no CFW-09?;
Verificar o motor: verificar todas as conexões do motor e se a corrente e tensão do motor estão de acordo com o modelo do inversor;
Desacoplar mecanicamente o motor da carga: se não for possível desacoplar o motor da carga, garantir que o giro do eixo do motor em qualquer direção (horário ou anti-horário) não cause danos à máquina ou riscos pessoais;
Fechar as tampas do inversor ou acionamento.
O controle V/F ou escalar é utilizado normalmente em aplicações que não exijam resposta dinâmica rápida, precisão na regulação de velocidade ou alto torque de partida (o erro de velocidade será em função do escorregamento do motor P138 então pode-se conseguir precisão de 1% na velocidade com controle escalar e com variação de carga).
O controle V/F ou escalar é recomendado para os seguintes casos:
Acionamentos de vários motores com o mesmo inversor;
Corrente nominal do motor é menor que 1/3 da corrente nominal do inversor;
O inversor, para propósito de testes, é ligado sem motor.
Para a maioria das aplicações recomenda-se o controle vetorial sensorless, o qual permite:
Operação em uma faixa de variação de velocidade 1:100;
Precisão no controle de velocidade de 0,5%;
Alto torque de partida;
Resposta dinâmica rápida;
Maior robustez contra variações súbitas da tensão da rede de alimentação e da carga, evitando desligamentos desnecessários por sobrecorrente.
Os ajustes necessários para o bom funcionamento do controle sensorless são feitos automaticamente, para isto, deve-se ter o motor a ser usado conectado ao CFW-09.